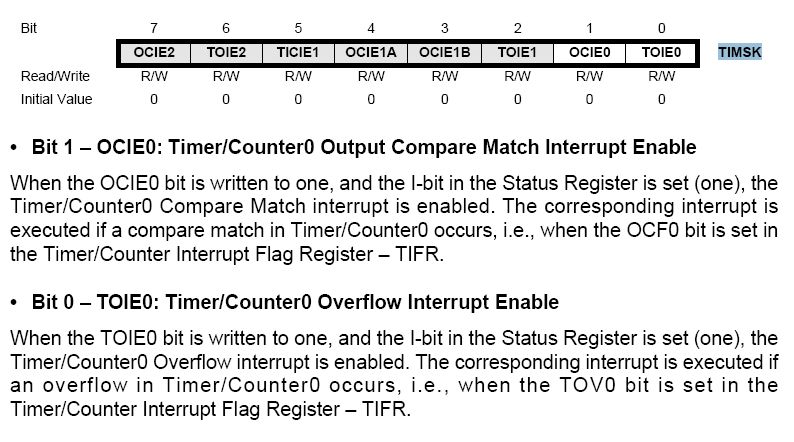
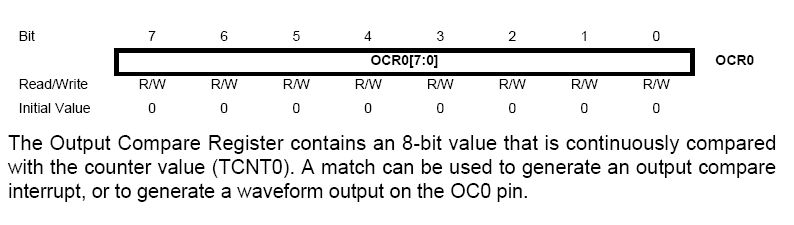
개요
과학 기술의 발전 및 전기 전자기기의 사용증가와 더불어 FA화, OA화, 시스템의 대규모화등 컴퓨터화에 의해 전자 장치의 역할이 더욱 크게 되었고, 정보를 고속으로 교환하는 다양한 정보 통신망의 실현에 따라 이용 주파수 스펙트럼도 확장되었다.
텔레비전, 라디오 등과 같이 전파를 수신해서 기능을 발휘하는 제품이나 컴퓨터와 같이 MHz대의 펄스를 사용하는 제품에서는 환경 오염의 일종인 전자파가 존재하는데, 이 전자파가 공간으로 방사 또는 전원 코드를 통해서 다른 제품에 영향을 줄때 이러한 전자파를 『노이즈』또는 EMI(Electro Magnetic Interference)라 한다.
이러한 노이즈는 전기 전자기기의 목적과 기능을 방해하는 불필요한 전기적 에너지라 할 수 있으며 이런 장해 전자파가 발생하는 이유는 반도체와 디지털기술의 발전으로 부품이 소형화, 고밀도화, 고속도화로 짧은 시간에 전압이나 전류가 급격하게 변화하기 때문이다
1. 노이즈의 종류
노이즈는 전기를 띤 구름이 뇌방전을 일으킬 때 발생되는 『자연노이즈』와 사람이 장치등을 사용할 때 부수적으로 발생되는 『인공노이즈』로 크게 분류되며, 자
연노이즈는 구름의 기단 사이에 기상 변화가 심할 때 낙뇌가 송전선 또는 통신 회선등에 직접 인가 되었을때 발생하는 직격 뇌써지와
뇌방전시에 구름과 구름 사이 또는 구름과 대지 사이에서 대전된 전하가 소멸되는 현상 즉 매우 큰 방전류에 의한 유도 현상으로
인하여 송전선이나 통신회선등에 이상 전압이 발생하는 유도뇌써지 등이 있다.
인공노이즈는 『방사노이즈』와『전도노이즈』가 있으며, 방사노이즈는 방송이나 휴대 무선기등의 통신용 전파에 의한 장해는 물론 송전선의 코로나 방전, 오토바이의 점화시의 노이즈 등 공간으로 직접 피해측에 전파하는 것이고, 기기나 회로간을 연결하는 신호선이나 제어선, 전원선 등이 본래 전송해야 할 신호들과 달리 이들 도선을 통해 피해측에 유도되는 전자파를 전도노이즈라 한다.
전도노이즈는 Transient, Impulse 등과 같이 전원선을 타고 들어와 Line간을 왕복하는 『노멀 모드 노이즈(Nomal Mode Noise)』와 전원선을 타고 들어온 뒤 Earth와 Line을 타고 나타 나거나 그 반대의 경우와 같이 Line 과 Earth간에 전달되는 커먼모드 노이즈(Common Mode Noise)로 구분되며, 노멀 모드 노이즈는 대부분 짧은 시간에 높은 전압을 주고 사라지는 것으로 기기는 예고없이 에러를 내게되고 특히 전송중에 있는 데이터는 치명적이 될 수 있으며, 커먼 모드 노이즈는 Ground를 기준 전위로 채택하는 Logic 회로가 내장된 전자기기나 Memory계통에 에러를 유발 시킬수 있다.
2. 노이즈 대책
기기들이 서로 조화를 이루어 공조할 수 있는 능력을 적합성( EMC:Electro Magnetic Compatibility ) 이라 하며 EMC는 EMI와 EMS로 구성되며, 노이즈 문제를 해결하기 위해서는 두가지 방법으로 접근할 수 있는데, 하나는 불용전자파의 방사를 억제하는 것이고(EMI:Electro Magnetic Interference, 전자파장해) 다른 하나는 어느 정도의 전자파 환경내에서도 그 장해를 견디며 정상적으로 동작할 수 있도록 내성(EMS:Electro Magnetic Susceptibility)을 강화시키는 방법이다.
노이즈 문제가 발생하려면 다음의 3가지 요소가 반드시 조합되어야 하며 이중 어느 하나만이라도 제거 되면 문제가 발생하지 않는다.
효과적인 EMI 노이즈 대책이란 회로 메카니즘의 적절한 밸런스를 이루는 것으로 좁은 영역에서의 EMC를 말하는 것이라 할 수 있으며, 이와 같은 노이즈를 저감하기 위한 실제 기술로는 접지(Grounding), 필터링(Filtering), 차폐(Shielding) 등이 있다.
1)접지기술
전자 기기 내부의 접지는 신호 그라운드(SG)와 프라임 그라운드(FG)로 나누어 볼 수 있는데, 노이즈에 의한 트러블은 이와 같은 SG계통과 FG계통의 레벨 변동이 원인인 경우가 많다.
SG는 회로 전류를 귀환시키는 그라운드이므로, 전류가 흐르는 그라운드이고, FG는 전류가 흐르지 않는 그라운드로서 FG에 전류가 흐르면 외부로 노이즈 방사의 원인이 되기도 하고, 외부의 전자계에 대한 감수성을 높이기도 한다.
따라서 어스회로의 임피던스를 가능한 적게 하고. 어스회로에 전류가 흐르지 않게 하며, 또한 그라운드 루프를 형성하지 않도록 하는 것이 기본이다.
2)Lay-out
전자 부품 및 내부와이어 같은 것들의 Lay-out 이 의외의 노이즈 특성을 좌우하는 경우가 많다. 기본적으로 전기적인 성격이 다른 부분은 분리하는 것이 좋다.
예를 들어
입력 <-> 출력, 디지털 <-> 아날로그, 고속 <-> 저속, 고압 <-> 저압, 저임피던스 <-> 고임피던스 를 분리하여 부품배치와 배선패턴을 최적화하여 용량결합, 유도결합, 공통 임피던스 결합에 의한노이즈 발생 메카니즘을 피하는 것이 좋다.
3)전자부품 선정
IC 및 TR과 같은 능동소자, 콘덴서, 인덕터, 트랜스와 같은 수동소자 및 콘넥터, 스위치와 같은 기구품등의 특성, 성능을 노이즈 발생 메카니즘과 관련시켜 컴토하고 최적인 부품을 선정함으로서 노이즈에 대한 내력(Immunity)을 강화시키고 노이즈성분의 발생을 억제 시킨다.
4)차폐기술(Shielding)
차폐는 노이즈의 영향을 받고있는 회로나 기기의 장해 방지 수법 중 가장 근본적이고 넓게 사용되고 있는 방법으로 일반적으로 용량 성분적인 결합을 방지하는 것을 『정전쉴드』 , 자계 및 전자파에 의한 결합을 방지하는 것을 『전자쉴드』 라고하며, 정전쉴드는 알루미늄이나 동 등의 금속케이스나 쉴드 케이블을 사용하는 대책으로 낮은 레벨의 회로나 고주파 회로에 효과적이며, 전자쉴드는 외부로부터 자속의 영향을 받기 쉬운(또는 외부로 자속을 누설하기 쉬운) 트랜스, 인덕터와 같은 것을 니켈 등과 같이 고투자율 금속의 케이스를 사용하여 내부(또는 외부)에 대하여 자속의 침입이나 누설을 방지하는것이다.
5)필터기술(Filtering)
도체를 통해 전달되는 전도노이즈 및 자유공간으로 방사되는 방사노이즈에 대한 대책에서 양쪽 모두의 대표적인 방법으로 필터링 기술이 있다. 필터는 인덕턴스와 커패시턴스의 조합으로 구성되며 전원계에 사용되어지는 것과 신호계에 사용되어지는 것으로 구분된다. 전원용 필터는 고전압, 대전류에 견디도록 설계되어 일반적으로는 30MHz 이하의 낮은 주파수 대역에서 주로 사용되고, 통상 30MHz이상의 주파수 대역에서 적은 전류의 신호계에 사용되는 신호용 필터는 실제의 제품에 적용해보면서 각각의 경우에 맞는 최적의 필터를 결정하는 경우가 많다.
노이즈 관련 용어
A. RFI(Radio Frequency Interference)
『무선주파장해』로 무선통신의 통신장해, 혼신을 일컬음.
B. EMI(Electro Magnetic Interference)
『전자파장해』로 무선통신기기, 전자기기, 기계, 자동차 등 모든 물체에서 발생하는 직류에서 초고주파까지의 전자기 방해를 일컬음.
C. EMS(Electro Magnetic Susceptibility)
『전자파감수성』으로 기기가 외부방해의 영향을 얼마나 쉽게 받는지를 나타낸 것.
D. EMC(Electro Magnetic Compatibility)
『전자환경적합성』으로 EMI와 EMS를 합친 것.
EMI 규격
미국, EU등을 비롯한 선진 각국에서는 EMI에 대한 법적규제를 실시하고 있고 EMI문제를 해결하기 위하여 정확한 측정방법, 대책 기술 개발 등에 노력을 기울이고 있다.
이에따라 전기전자 제품의 수출시 반드시 해당국가의 EMI 규제에 통과하지 않으면 안되며, 주요 규격은 다음과 같다.
CISPR (IEC 국제 전자파장해 특별위원회)
FCC (미국연방통신 위원회)
VDE (독일 전기기술자 현회)
VCCI (일본정보처리장치 등 전자파장해 자주규제협의회)
1.NOISE FILTER의 개요
AC전원 라인은 외부의 노이즈가 전자기기로 침입하기도 하고, 전자기기의 내부에서 노이즈가 외부로 유출되는 경로가 된다.
또한 AC 라인 노이즈에는 라인간에 발생하는 『노멀모드노이즈(Normal Mode Noise)』와 양쪽 전원 라인과 그라운드 사이에서 발생하는 『커먼모드노이즈(Common Mode Noise)』 가 있다.
따라서 노이즈 필터는 이러한 두 종류의 노이즈를 제거하는 회로망이 필요하다.
노이즈 필터는 3종류의 부품으로 구성된 것이 일반적으로 각각의 부품은 노이즈의 모드와 주파수에 따라 커먼 모드 초크코일이 저역의 커먼 모드 노이즈를 제거하고, 어크로스 라인 콘덴서가 저역의 노먼 모드 노이즈를 제거하며, 또한 라인 바이패스 콘덴서는 고역의 커먼 모드와 노멀모드 양방의 노이즈 제거 역할을 한다.
커먼모드 초크코일은 1개의 폐자로 Core에 동일한 인덕턴스의 코일을 반대방향으로 감아서 부하에 공급하는 전류에의한 코아의 포화를 방지하고(자속을 서로 상쇄시킴) 커먼 모드 노이즈에 대해서는 인덕터로 동작하며, 라인 바이 패스 콘덴서는 라인과 프레임 그라운드간에 접속하는 콘덴서이다.
2 사용상 주의사항
1)NOISE FILTER는 기기의 입출력 단자와 가장 가깝게 접속해야 하며, NOISE FILTER의
입출력선은 서로겹치지 않도록 하여 NOISE FILTER의 감쇄 특성이 최대한 발휘되도록 한다.
2)NOISE FILTER를 기기에 장착할 때는 가능한 고주파 저항을 최소화 하여야 하며,
이를 위하여 금속 케이스의 NOISE FILTER를 접속할 때는 기기의 접속부분의 도장성분을 제거하여 전기 전도성을 좋게하며, 접지 단자가 있는 NOISE FILTER는 반드시
NOISE FILTER의 접지 단자와 가장 가까운 거리에 접지한다.
3)고전압의 SURGE IMPULSE가 침투할 우려가 있는 경우에는 NOISE FILTER 앞단에
SURGE ABSORBER를 사용하는 것이 좋다.
4)NOISE FILTER의 전압, 전류 정격 이내에서 사용하여 NOISE FILTER의 성능 및 신뢰성이 떨어지지 않도록 한다.
EMI Filter (Noise Filter)의 의미
Noise란 원하지 않는 신호를 말합니다.
특히, 전기전자 분야에서 노이즈는 불요전자파를 말합니다. 불요전자파는 전원선을 통해 다른 기기에 영향을 주는 전도노이즈(CE)와 공기중을 통해 다른 기기로 전달되는 방사노이즈(RE)가 있습니다.전기를 소비하거나 생성하는 모든 기기들은 전자파를 발생시키고 또 전자파의 영향을 받기도 합니다.컴퓨터와 주변기기들을 예로 들어 보면, 컴퓨터는 같은 전원 (Power Source)을 사용하는 TV, 선풍기, VTR, Lamp, 전동드릴에 전원선과 공기중을 통해 전자파의 영향을 주기(Emission)도 하고 그들로부터 전자파의 영향을 받기(Susceptibility)도 합니다.
EMI Filter의 역할
EMI Filter는 기기의 전원 입력단에 설치되며 기기에서 방출되어 전원선을 통해 빠져나가는 불요전자파를 차단, 흡수, 대지로 Bypass 시켜주는 전자부품입니다.
- EMC : Electromagnetic Compatibility(전자기 양립성)
- EMI : Electromagnetic Interference (전자기 방해)
- EMS : Electromagnetic Susceptibility(전자기 감수성)
- CE : Conducted Emission (전도 방출)
- RE : Radiated Emission (방사 방출)
- CS : Conducted Susceptibility(전도 감수성)
- RS : Radiated Susceptibility(방사 감수성)
● Permissible noise limits(노이즈 허용 규격치)
다양한 규격들이 전도 EMI에 대한 규격치를 설정하고 있다. 이러한 규격치들은 전압으로 측정되고 dB ㎶로 값이 주어진다. 여기서 0dB은 1㎶이다.
이 전자파 간섭은 Bandwidth와 Receiver로 불리우는 측정 계측기를 사용하여 측정되고, 이 두 가지 수신기들은 Quasi-peak(준첨두) detector와 Average(평균) detector로 사용된다.
측정의 반복성을 유지하기 위해 main 전원의 impedance는 일정해야 한다. 규격에서는 인공 주전원 회로망이라고 하며 때로는 전원 임피던스 안정화 회로망(LISN)이라고 불리기도 한다.- 이것은 noise에 규정된 impedance를 실어주고 또 측정에 영향을 줄 수 있는 주전원에 대한 noise를 걸러준다.
그림 1은 유럽 주거지역, 상업지역과 경공업 환경의 일반적인 기준을 보여준다.
그림 2는 유럽 공업환경의 일반적인 기준을 보여준다.
30MHz이상에서는 전도 noise 대신 방사 noise 간섭을 측정한다. 이것은 지정 안테나를 사용하여 Open field site에서 측정된다.
● Interference sources and spectrums
전도 EMI의 가장 일반적인 요인은 SMPS, PWM, Frequency Converter 또는 Motor drive와 Phase angle controller와 같은 전력전자 제품들이다.
방사 spectrum은 일반적으로 낮은 주파수에서 매우 크게 발생한다. 그리고 주파수 증가에 따라 줄어든다.
Noise가 수용할 수 있는 규격치 이하로 떨어지는 point는 여러 가지 요인에 따르며, 가장 주요한 요소는 동작주파수와 반도체 부품의 rise time이다.
● Interference propagation (간섭의 전달)
EMI는 두 가지 방법으로 전달 된다.
By radiation (방사) - 에너지가 있는 곳에서는 자기장 또는 전기장을 통해서, 또는 source와 피간섭물 사이의 전자파로써 서로 결합될 수 있다.
By conduction (전도) - EMI energy는 전력 공급 선과 data cable을 따라 전파된다.
방사와 전도 EMI는 전체적으로 분리된 문제로 생각할 수 없다.
Cable에 전도된 noise는 antenna로 작용하는 cable로 인해 방사될 것이다. 그 방사는noise의 파장과 비교하여 상대적으로 cable의 길이에 따라 증가할 것이다. 역시, cable은 수신 antenna로써 작용하여 방사 noise를 받아들이게 된다.
150MHz 부근 이하에서, system 내에서의 가장 영향을 미치는 방사 발생 부품들은 일반적으로 전원 공급 장치와 신호선들이다. 이러한 cable들의 적절한 filtering은 cable의 전도 noise 방사를 줄이는 것이다.
150MHz 이상에서, PCB 트랙과 짧은 내부의 cable들은 효과적인 안테나로 작용한다.
PCB의 방사를 감소시키기 위해서는 트랙의 길이와 루프의 면적을 감소시켜야 하고, 가능하면 접지판을 사용하여야 한다. Digital IC의 분리는 매우 중요하며 shield 처리도 요구될 것이다.
● Interference types(간섭의 종류)
전도 EMI와 연관된 문제들을 이해하기 위해서는 먼저 전도 noise의 두 가지 mode를 이해할 필요가 있다. 즉, Differential mode-또는 symmetrical(대칭) mode와 common mode-또는 asymmetrical(비대칭) mode 이다.
Differential mode noise는 시스템의 상간에서 전압을 발생시키고 대지와는 무관하다.
대칭 모드 전류는 한 상을 따라 흐르고 다른 상을 따라 돌아 나온다.
Common mode noise는 각각의 상과 대지사이에 전압을 발생 시킨다. 비대칭 모드의 전류는 earth의 path(일반적으로 기생 capacitance)를 따라 noise원으로부터 대지로 흐르고 다시 각 상으로 돌아 온다. (그림 3. VCM) 전원라인 필터는 common mode와 differential mode noise를 함께 감쇄할 수 있도록 설계되어야만 한다.
● Mains filters
최대 전력 전송은 전원과 부하 impedance가 일치했을 때 발생한다. Power line filter는 impedance 사이의 최대 불일치 발생을 목적으로 하는 inductor와 capacitor 회로망이다. 그러므로 noise source에서 전원 line cable로 전송되는 EMI 간섭량을 줄일 수 있다.
Inductor L1과 L2는 -전류를 보상하는 형태로- 일반적으로 toroidal core에 감는다.
이 권선법은 differential mode current와 mains current를 서로 상쇄시키도록 자속을 발생시키고, 반면 common mode current는 배가가 될 것이다. 이것은 common mode current에 큰 inductance를 주고, 주전원 current에 의해 생성되는 큰 자속(magnetic flux)에 의해 inductor가 포화 되는 것을 막아준다.
각 상간에 위치하는 X class capacitor라고 말하는 capacitor들은 높은 pulse 정격 전압을 가져야 하고 differential mode interference를 감쇄 시키는 데 사용된다. 상과 earth 간의 Y class capacitor로 알려진 capacitor들은 좀더 엄격한 등급이어야 하고 common mode interference를 감쇄 시키는 데 사용된다. Y capacitor의 용량은 허용 누설전류에 따라 제한된다.최대 누설전류는 규격과 법규와 장비의 형식에 의해서 제한된다.
누설전류는 다음에 의해서 주어진다.
lL=2πㆍUㆍfㆍC
IL - 누설 전류
U - Capacitor 전압
f - 주전원의 주파수
C - Capacitor 용량
전원용 filter는 고주파 interference가 filter를 우회하지 않도록 가능하면 전원 입력부 가까이 설치 되어야 한다. IEC inlet module은 이 목적에 적합하도록 이상적으로 맞게 되어 있다.
높은 감쇄 또는 동작 주파수 범위에서의 효과를 증가시키기 위해 그림 4에서 보여주는 1단 회로보다 좀더 복잡한 filter를 여러 개의 common mode 또는 differential mode inductor 그리고 capacitor들을 사용하여 만들 수 있다.
● Filters with earth line chokes
시스템의 모든 케이블에 전자파 간섭이 동시에 발생될 수 있다. 이 경우 earth cable에도 동일한 noise가 발생될 것이다.
표준 필터는 phase line noise를 감소시킬 수 있지만, 대지에 대해서는 그렇지 못하다. 접지선에 유기된 noise는 장비로 유입될 수 있고 장비의 장애를 발생시킬 수 있다. 이 간섭을 줄이기 위해 earth line choke를 장착하거나 filter와 조ㅜ 합한다. Earth line choke는 일반적으로 common mode current에 대한 별도의 감쇄효과를 줄 것이다.
시스템에서 earth line choke를 우회하지 않도록 주의가 필요하다. 예를 들어 PC는 earth line choke가 구성된 filter를 가지고 있을 것이다. 만약 이 PC가 main 전원으로부터 전력을 공급 받는 printer와 연결되어 있고, 만약 그 printer에 earth line choke가 없다면 noise는 아마도 주전원에서 printer로 가는 경로를 찾고 PC로 연결되는 신호선을 따라 PC안에 있는 earth line choke를 우회할 것이다.
EMC회로는 노이즈 필터이며, 인덕터(CHOKE)와, 캐패시터(CAPACITOR)로 구성되었다.
인덕터는 Noise filter의 가장 중요한 부품이며 Normal mode choke와 Common mode
choke로 나뉜다.
Normal mode choke는 Iron powder가 주로 사용되며 이 코아는 포화 자속밀도가 높을
뿐 아니라 투자율이 작은 대신 주파수 대역폭이 넓으므로 Line cross capacitor(X CAP)
와 조합하여 Normal mode noise를 효과적으로 억제한다.(자속을 한 방향으로 가지게
winding 한다).
Common mode choke는 투자율이 크고 hysterisis 손실이 적은 페라이트 코아를 사용하여 자속이 합하여 지도록 winding하여 Line to ground capacitor(Y capacitor)와 결합하여 사용하면 Common mode noise를 억제 할 수 있다.






 invalid-file
invalid-file